���������(li��n)�W(w��ng)�İl(f��)չ�����ИI(y��)�������𣬺ܶ������ϵ�y(t��ng)���_ʼʹ���Ԅӻ��O(sh��)�䣬�S���Ԅӻ��̶ȵIJ��������������O(sh��)��Ҳ��ƽ�沼������g���ְl(f��)չ����˴���؛����Ҫ�M�д�ֱ�����ݔ�͡����д�ֱݔ���ܵ���ֱ�����C�t�����x�b�䡣ͨ�^��ԓ�N���Ϳ��ٴ�ֱ�����C�ķ����о���������ϵ�y(t��ng)��؛��Ĵ�ֱݔ�ͣ��ṩһ�N���и�Ч�Ľ�Q������
��ǰ�����YԴԽ��Խ�oȱ���F(xi��n)��������ϵ�y(t��ng)�����ء�Ч��Ҫ��Խ��Խ�ߣ����w�惦��ݔ���O(sh��)������\�ã���Ŀǰ�ڴ�ֱ����ݔ��؛����O(sh��)��ҪôЧ�ʲ��ߣ�Ҫô�ο��M���οڳ���������Ҫ���_�O(sh��)����ܝM��Ҫ��ռ�È��غܴ��Qԓ���}�����ʹ�ֱ�����C���аl(f��)�ɴ˶�����
һ�����������C�Ĺ���ԭ��
1�����c�����_�����C���F(xi��n)�c����ݔ���O(sh��)�䌦�ӣ�ͬ�r���M؛�ͳ�؛���_����ǰ���_ֻ�І�һ�M�ڡ����������C�Ĺ��ܡ������c���ڣ�
(1)���_�����C���F(xi��n)����؛���ͬ�r�M����
(2)؛����g���٣����F(xi��n)�M�бPݔ�ͣ�
(3)��׃���̲��֣����g��������ߡ�
2�����ȃ�(y��u)�ݣ�ͨ����朗l�бP�����Cֱ��ͨ�^�ⲿ�O(sh��)���؛�����������C�бP�������C��(n��i)�]�Є����C��(g��u)�M�н��g����D1��ʾ������������Cֻ��1����ں�1�����ڣ�Ҫ���g�����O(sh��)��r����Ҫ�ڲ�ͬ�ĵط����b���_ͬ������C��Ҳ���܉�?q��)��F(xi��n)����؛��ͬ�r�M���������C������g�C��(g��u)�鷭��ʽ������������ȴ����r�g�L���\��܉�E�c�����C�бP�ϵ�؛���н��棬��Ҫ�������؛���ڲ�ͬ��ͬ�r����r�����܌��F(xi��n)�M�бPݔ�͡�
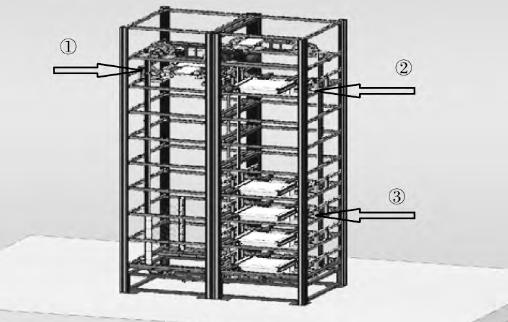
3���Cе��(g��u)�죺�����������C��D2��ʾ���������ҷ��_��ͨ�^��M朗l���Ų����F(xi��n)ͬ�w���֣��бP�̶���朗l���S朗lһ���\�У�ʼ�K����ˮƽ�ˑB(t��i)���������ҽ�������؛��ɏ���߅����λ���M�������C��朗l�����бP��؛��������C��߅����(j��ng)�^픲�ݔ�͵������C��߅��Ȼ���½������F(xi��n)؛�����߅������߶ȵ���߅������߶ȵ�ݔ�ͣ�ֻ�����M���ڵ�λ�ð��b���g�C��(g��u)���c�ⲿ�O(sh��)�䌦�Ӽ��ɡ�
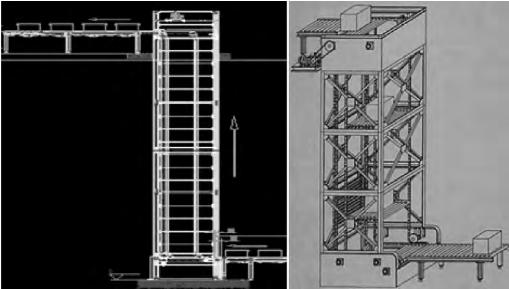
�D1��һ�����朗l�бP�����C
�D2����ͬ��ͬ�������C
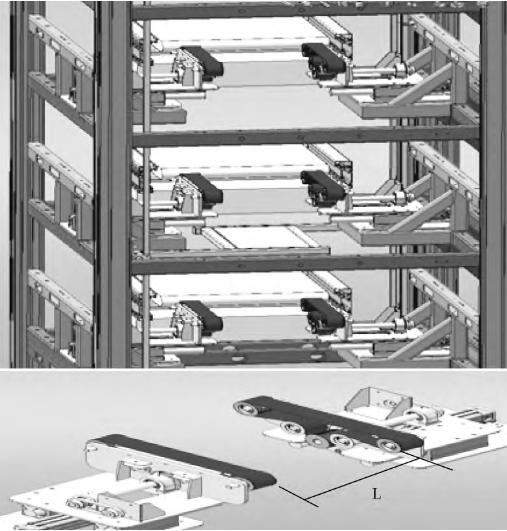
���ˌ��F(xi��n)����ͬ�r�M���������C�бP�O(sh��)Ӌ�ɾ����ο�ܽY(ji��)��(g��u)������(j��)ϵ�y(t��ng)������Ҫ���҂��ڌ����ⲿ�O(sh��)��Ľӿ�λ�ã���D���еĢ١��ڡ��۵�λ�ã��O(sh��)����ڻ���ڣ����ڼ��^��ָ��̎�O(sh��)����ڽ��g�C��(g��u)�����^��ָ��̎�O(sh��)�ó��ڽ��g�C��(g��u)�����F(xi��n)�����C�c�ⲿ�O(sh��)��Č��ӡ����g�C��(g��u)��D����ʾ���бP�ɏ�ԓ�C��(g��u)���g���^�����҃ɲ��ֿ�������s���@�ɲ��ֵľ��x׃�����r�ɿء����O(sh��)����׃���x��̣��t�����̣�����x�r�������؛����x��С��؛��ߴ磬�C��(g��u)��ס؛������̣�����x�r����؛��ͨ�^��Ҫ�İ�ȫ���x������؛��ߴ磬؛��ɏ����g���^�����˕rֻҪʹ���g�b�õĿ�׃���x�ڣᡢ����x�g�����ГQ�����Ɍ��F(xi��n)؛��·���x��Ҫôͨ�^���g�C��(g��u)��؛�b���M�������C��Ҫôֱ�Ӵ��^���g�C��(g��u)���_��һ�����g��λ�ã�ͬ��ͬһ�_�����C��ֻҪ����(j��)�ⲿݔ���O(sh��)��IJ���λ�ã��Ϳ����b�������g�C��(g��u)���M����g���g�����F(xi��n)����ͬ�r�M�������C�����ⲿݔ���O(sh��)��IJ��ã����M�������C��С푑��r�g�������g�C��(g��u)�ģ���x������x��ģ���x������x��λ�Ƶ�׃���������һ���бP����֮ǰ��ɣ��r�g�С���бP�g���pȥ؛��߶Ⱥ������C��ԓ��λ�Ƶ��\�Еr�g����С푑��r�g�Q���������C��Ч�ʡ�
�D3 �����C���g�C��(g��u)
���������C���I(y��)����
1�����I(y��)�^��
�������ҽ����������C�������F(xi��n)�O(sh��)���ⲿ�У�����ںͣ��ӳ��ڡ������C�_�C�\�к���؛��ͬ�r�ڣ�����ڌӶ���Ҫ�M�������C���˕rϵ�y(t��ng)ֻ��Ҫ�Д�؛�������O(sh��)��ӌ����������C�бP���Ƿ��ѽ�(j��ng)��؛���ڣ��������бP�t�Д�����M�������C�����ӽ��g�C��(g��u)���ГQ���g�C��(g��u)��׃���x������x���_����؛늙C��؛�����������C��(n��i)�������ӵ�؛�ֻҪ�ǝM���бP�пl����������ͬһ�r�g�M�������C��Ȼ�������C��ѭ�h(hu��n)�\�D(zhu��n)�����бP�ܶ���ʼ��(j��ng)�^�����ӣ����F(xi��n)؛�ﲻ�g���M�P�M�������C�������ڄ�����
؛���M�������C����(j��ng)�\�͵��_ָ�����ڌӕr��؛����Ҫ�������C���˕rϵ�y(t��ng)�ѳ���̎�Ľ��g�C��(g��u)��׃���x�ГQ������x���_����؛늙C��؛�ﵽ�_������ݔ�ͳ������C���������C�бP�t���^���g�C��(g��u)��׃�ɿ��бP��B(t��i)�M����һ��ݔ��ѭ�h(hu��n)�����؛�{(j��ng)�^ij�ӣ�ϵ�y(t��ng)�Д�ԓ�Ӳ����؛��������Ҫ����һ�ӣ��tϵ�y(t��ng)�ѽ��g�C��(g��u)��׃���x�ГQ������x���˕r؛����бP�����Դ��^�Ľ��g�C��(g��u)�����^���ܶ���ʼ�������C��ɲ����؛���ͳ���ָ���ӣ���������C���ڄ�����
2������ԭ��
�������C����PLC���ƣ�����늙C����׃�l���(q��)�ӣ����a����ۙͬ���㷨��ϵ�y(t��ng)���r�ɘӸ�ۙ�бP��Ϣ��ÿ��؛���M�������C������ϵ�y(t��ng)�Ԅ�ӛ䛺̈́h���бP�ϵ�؛����Ϣ������Ϣ�������Cϵ�y(t��ng)�ж�ָ�]؛���M������Ҫ����(j��)�����g�C��(g��u)�Ŀ��ƣ����g�C��(g��u)��ϵ�y(t��ng)�l(f��)���ж��M�����ָ����������ӿ�׃���x�ГQ�������ГQ��əz�y����̖�����o���أ������ⲿݔ���O(sh��)���؛����؛����������g�C��(g��u)�ГQ����δ������С푑��r�g��ɣ��t������ͣ�C��
3������Ҫ�c
(1)��Ҫ�ʴ_Ӌ��؛����M�������C�r�g��
(2)늚��O(sh��)��푑��r�g�̣��pС��С푑��r�g��
(3)�����C�������ٶ����c���g�C��(g��u)�����r�gƥ�䣻
(4)؛����Ϣ��ۙ�Д��횜ʴ_��������㷨���C��
(5)�бP�����̎������t���܌��F(xi��n)�M�бP��
�������ʹ�ֱ�����C�đ��÷���
ԓ�����C���ж��M�ڡ�����ڵ����c���ڈ��������Ŀ�dz��m�ϣ��������C���\���ٶ���С2.7��ÿ�бP��ÿС�rݔ��؛�����1300�������_���ܝM��������ϵ�y(t��ng)�������������w�惦��؛��Ԯ�ǰ���е���ʽ؛�܃���ϵ�y(t��ng)������һ���������һ�_���y(t��ng)����ʽ�����C��ÿ��һ�����̈́������\һ��؛������p؛λ�r�����\�ɼ���������Ч�ʾ�ֵÿС�r���600����������͵�����ʽ�����C�����ŷ��(q��)���p؛λģʽ��ÿС�r�ܰ��\600�������Ч�ʵͣ��I(y��)������r������؛�ܽ�(j��ng)����Ҫͬ�r�����죬؛��ȴ�������أ������C�h(hu��n)��(ji��)�ɞ�Ч��ƿ�i��������ñ����Ϳ��ٶ��������C������؛�����ͬ�r���F(xi��n)���������죬���pС؛����꠵ȴ��r�g���ɴ˿��Կ���������ƹ��r�£�ԓ�����C�ܮa(ch��n)�����ߵ�Ч�ʣ���(ji��)�s����Ŀ��g���������O(sh��)Ӌ�ṩ���ӵIJ��ַ�������㕽Ӳ�ͬ�Ӹߵ�����ݔ���O(sh��)�估�}��ϵ�y(t��ng)����һ�w�O(sh��)�䷽�棬���߃�(y��u)�ݣ�����ǰ���V����
ͨ�^���Ϸ������ڮ�ǰ���������c�Ԅӻ����g(sh��)�Y(ji��)��Խ��Խ�o�ܣ�Ч�ʡ�����Ҫ��Խ��Խ�ߵ���r�£����Ľ�B�����ڌ��Ӳ�ͬ�Ӹ��O(sh��)������Ϳ��ٴ�ֱ�����C�����F(xi��n)�˲�ͬ��؛���ͬ�r�M������(ji��)ʡ�˿��g�������Ч�ʣ����҂��ڽ��Ă}���������֒����������I(y��)�����ȸ��N�����I(l��ng)����Ҏ(gu��)���r�ṩ����Ľ�Q�������b���x�� |
 �P����ݔ�͙Cе�O(sh��)������˾��ʽ�����C���I(y��)Ʒ�ƣ����M���ŵ��^Ʒ��
�P����ݔ�͙Cе�O(sh��)������˾��ʽ�����C���I(y��)Ʒ�ƣ����M���ŵ��^Ʒ��